QSR-X1
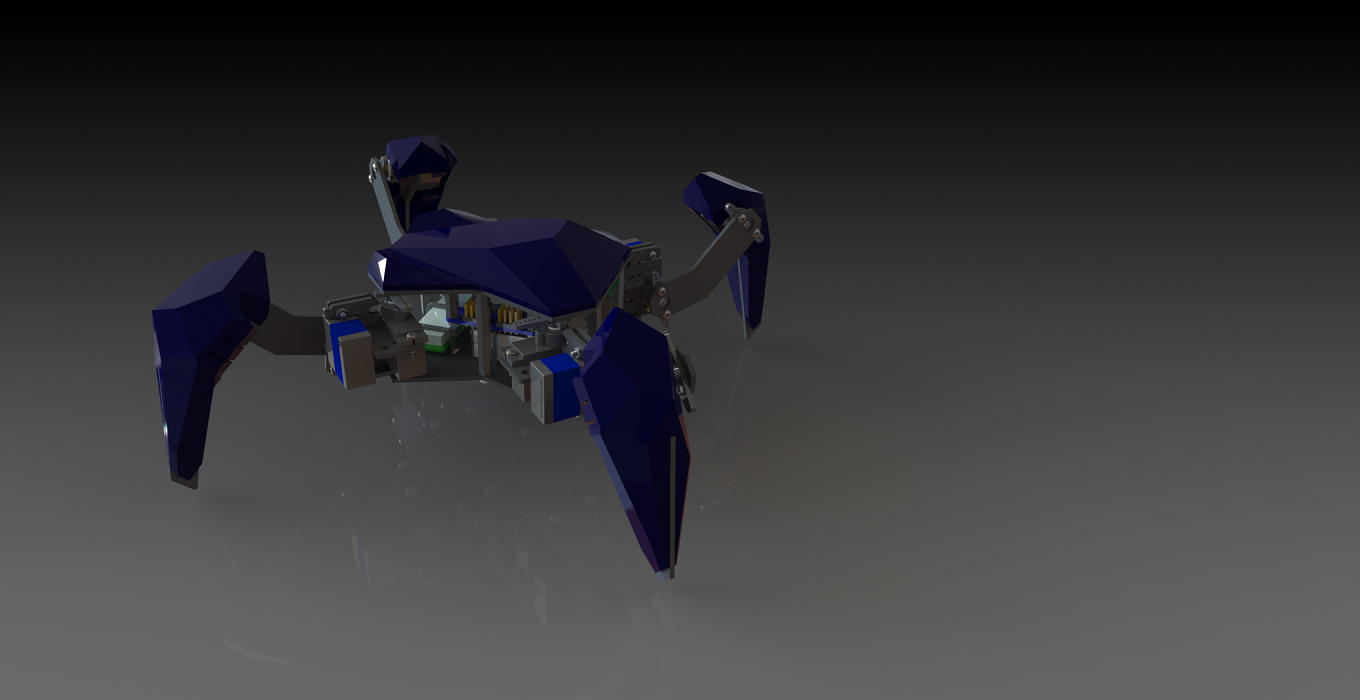
A remote control quadruped robot utilize Inverse Kinematic motion control technology.
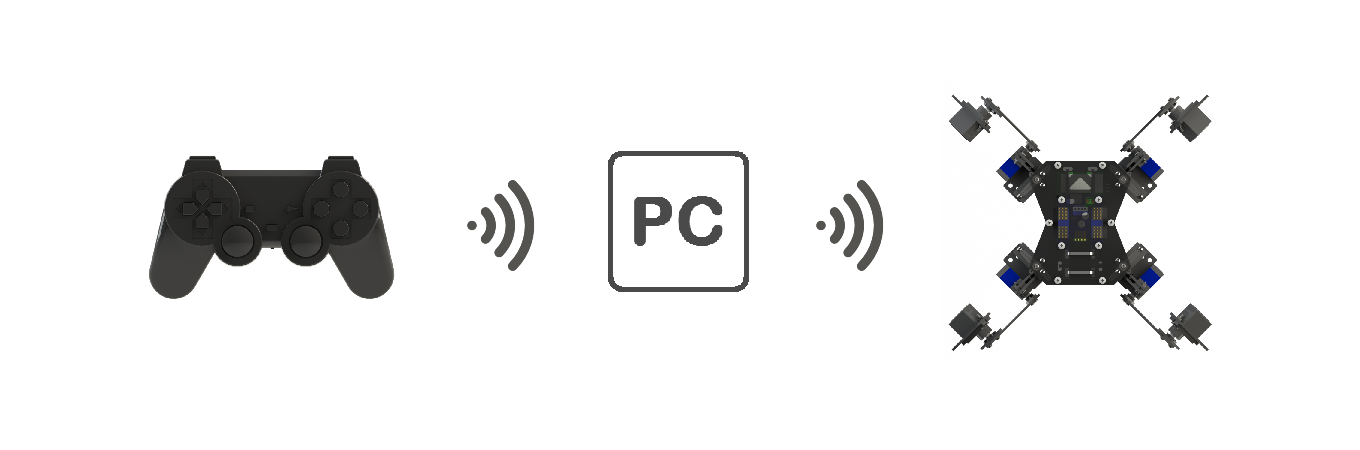
Thanks to the use of PC processing power and Inverse Kinematic motion control technology, the GUI able to generate smoothes motion control algorithm by processing more than 29,000 calculations per second & each joint's actuation position updated about 50 times per second.

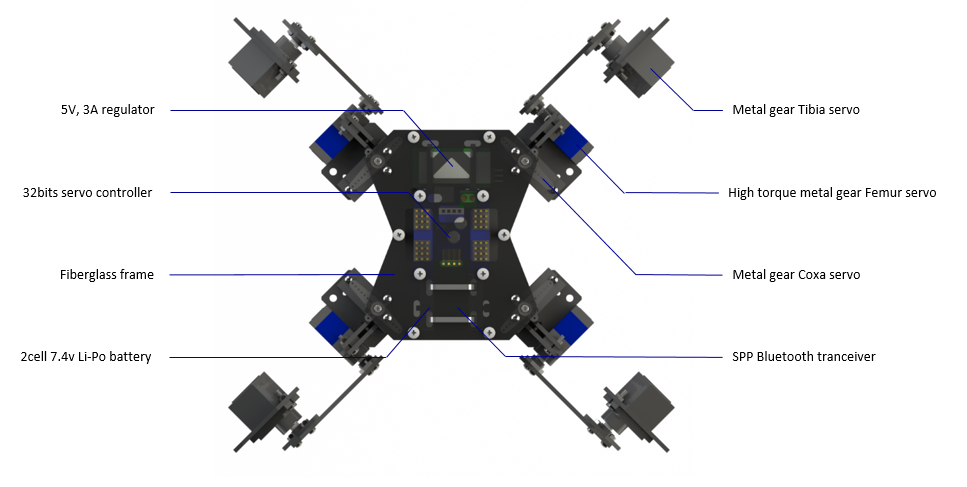
32 BITS SERVO CONTROLLER
Provide enormous processing power to generate 0.1uS PWM accuracy & 1uS resolution.
Provide enormous processing power to generate 0.1uS PWM accuracy & 1uS resolution.

ERGONOMIC GAMEPAD
Utilized standard PC based gamepad as user interface.
Utilized standard PC based gamepad as user interface.

2.4Ghz WIRELESS GAMEPAD
Allow full mobility to end user.
Allow full mobility to end user.

EMBEDDED INVERSE KINEMATIC
To generate smoothess motion control algorithm.
To generate smoothess motion control algorithm.
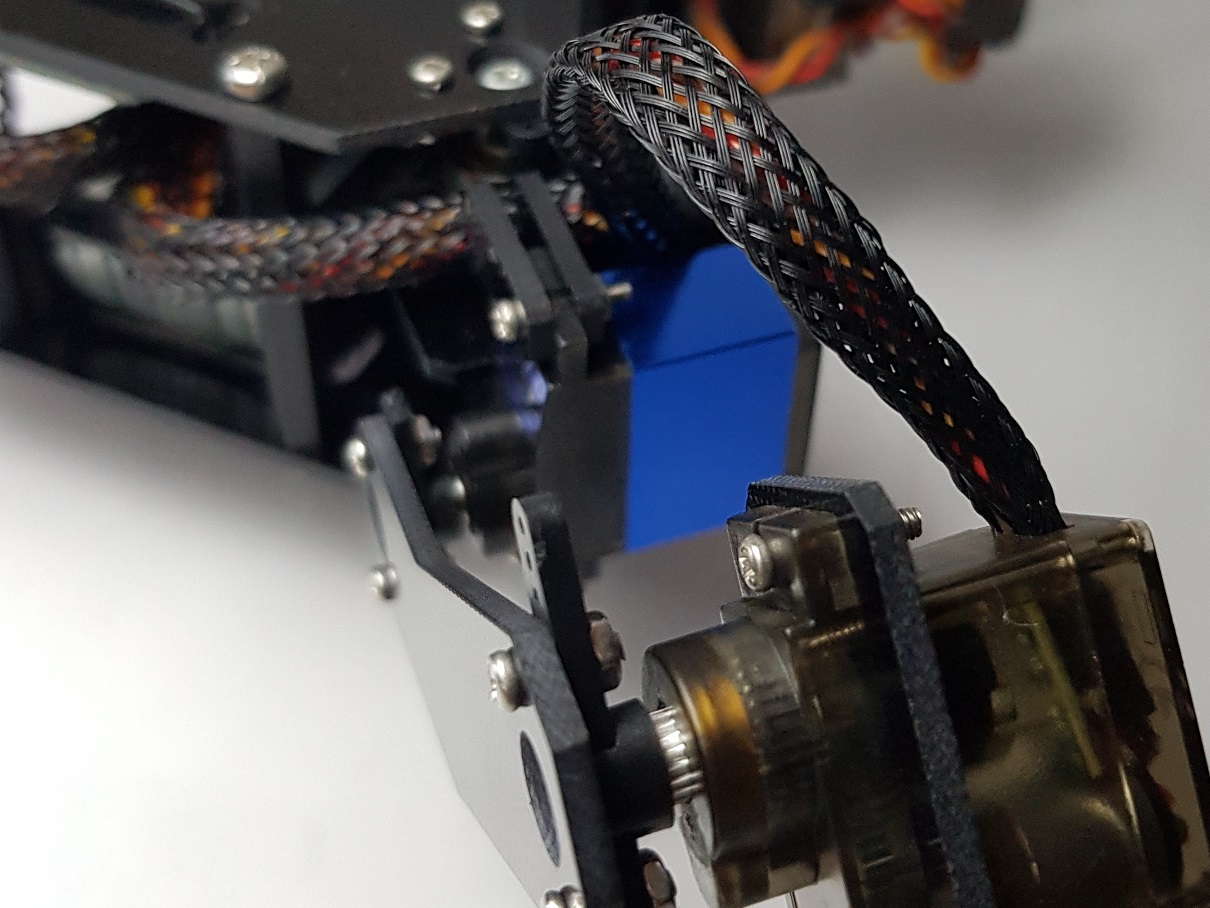
FULL METAL GEAR SERVO
Provide longest durability ever in each joint.
Provide longest durability ever in each joint.

BLUETOOTH ROBOT LINK
Enable virtual RS-232 serial link between GUI & robot.
Enable virtual RS-232 serial link between GUI & robot.
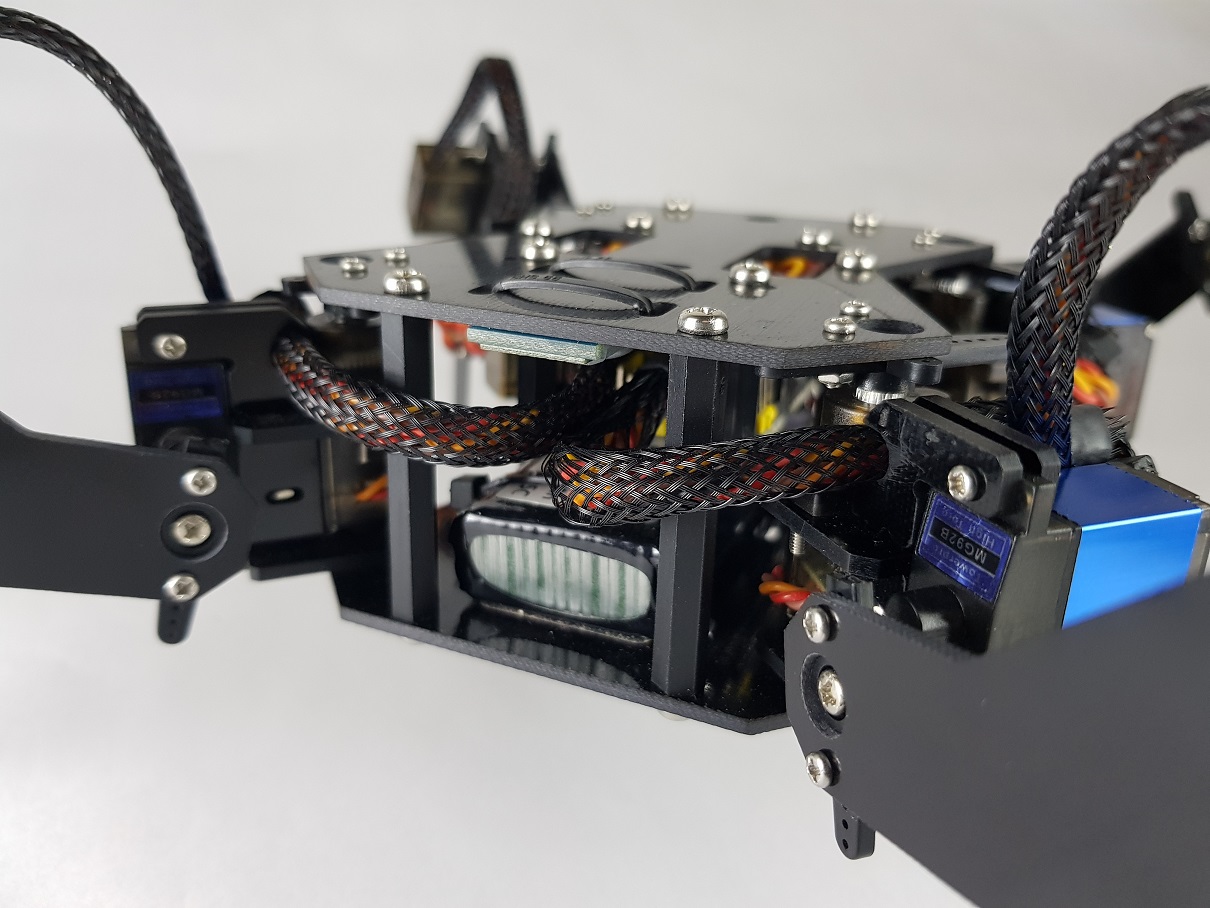
FIBREGLASS FRAME
CNC cut fibreglass frame provide maximum toughness for its structure yet light in weight.
CNC cut fibreglass frame provide maximum toughness for its structure yet light in weight.

PC BASED GUI
Provide hassle free & ease of use solution during setup & calibration. (Windows based)
Provide hassle free & ease of use solution during setup & calibration. (Windows based)

HOW IT WORKS

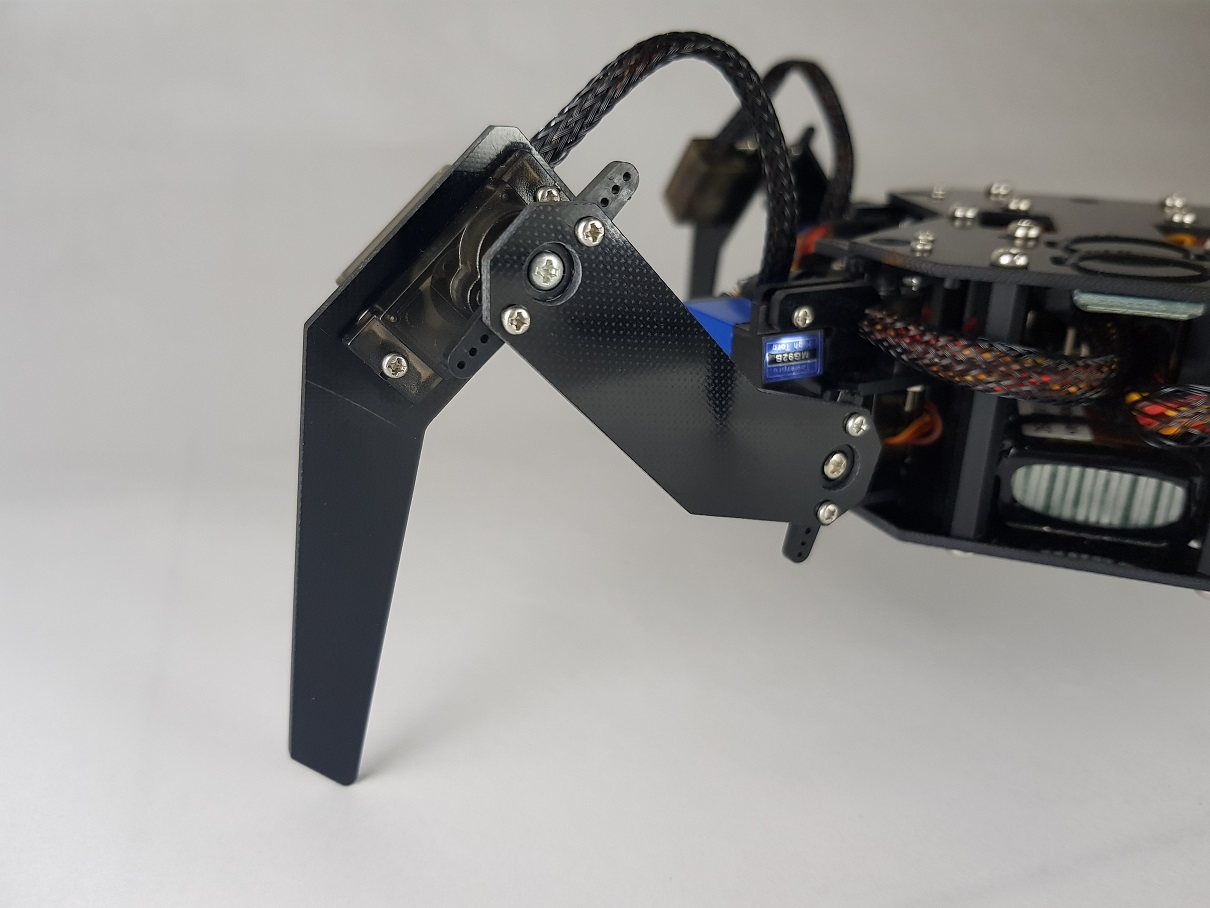
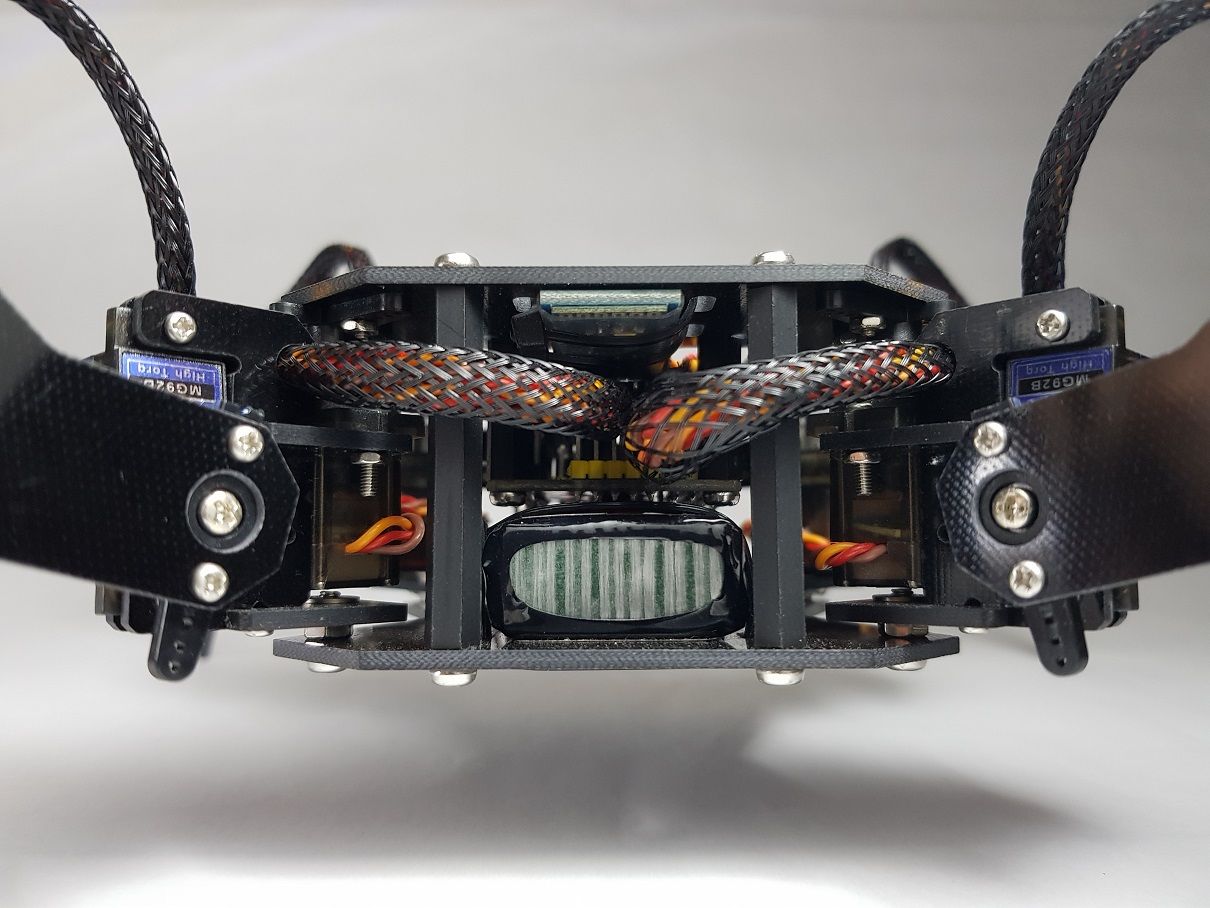
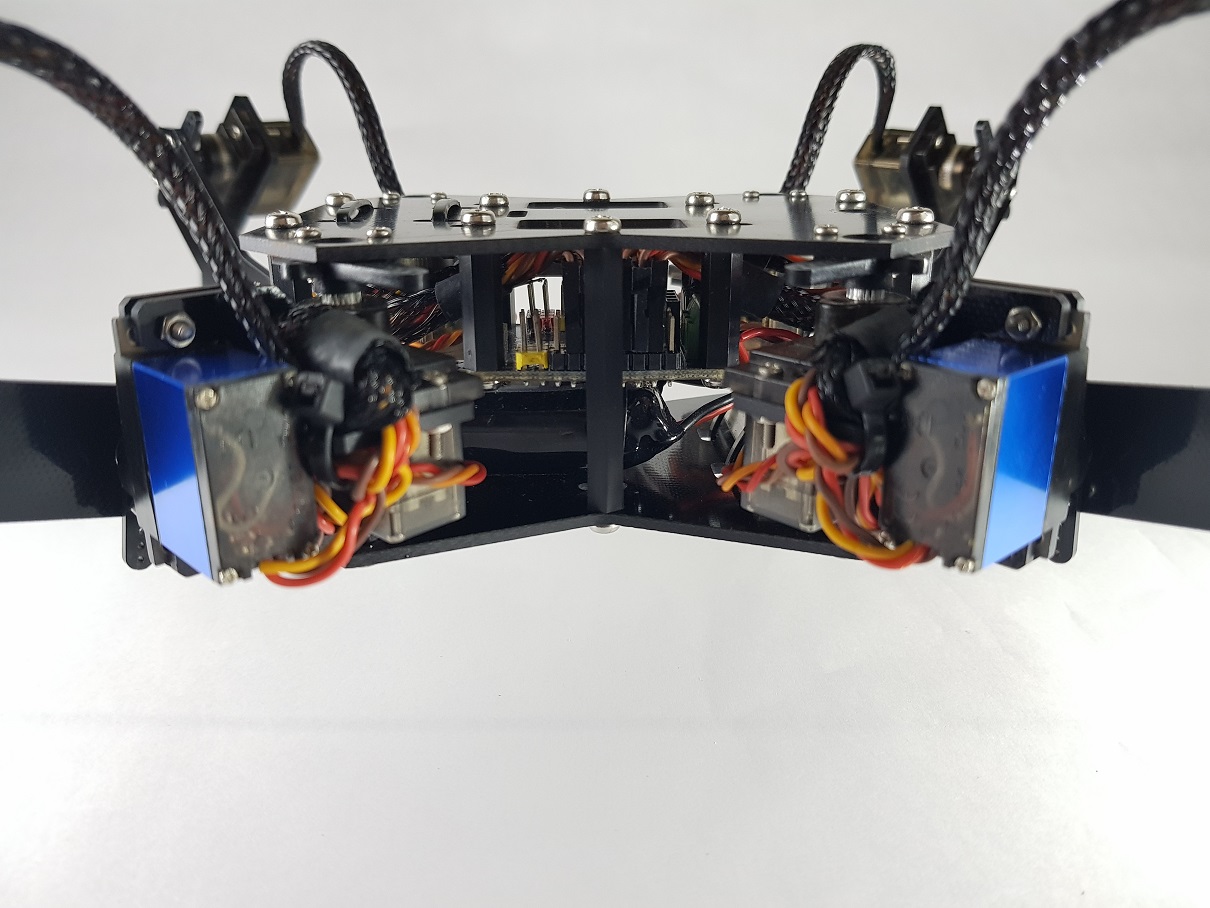
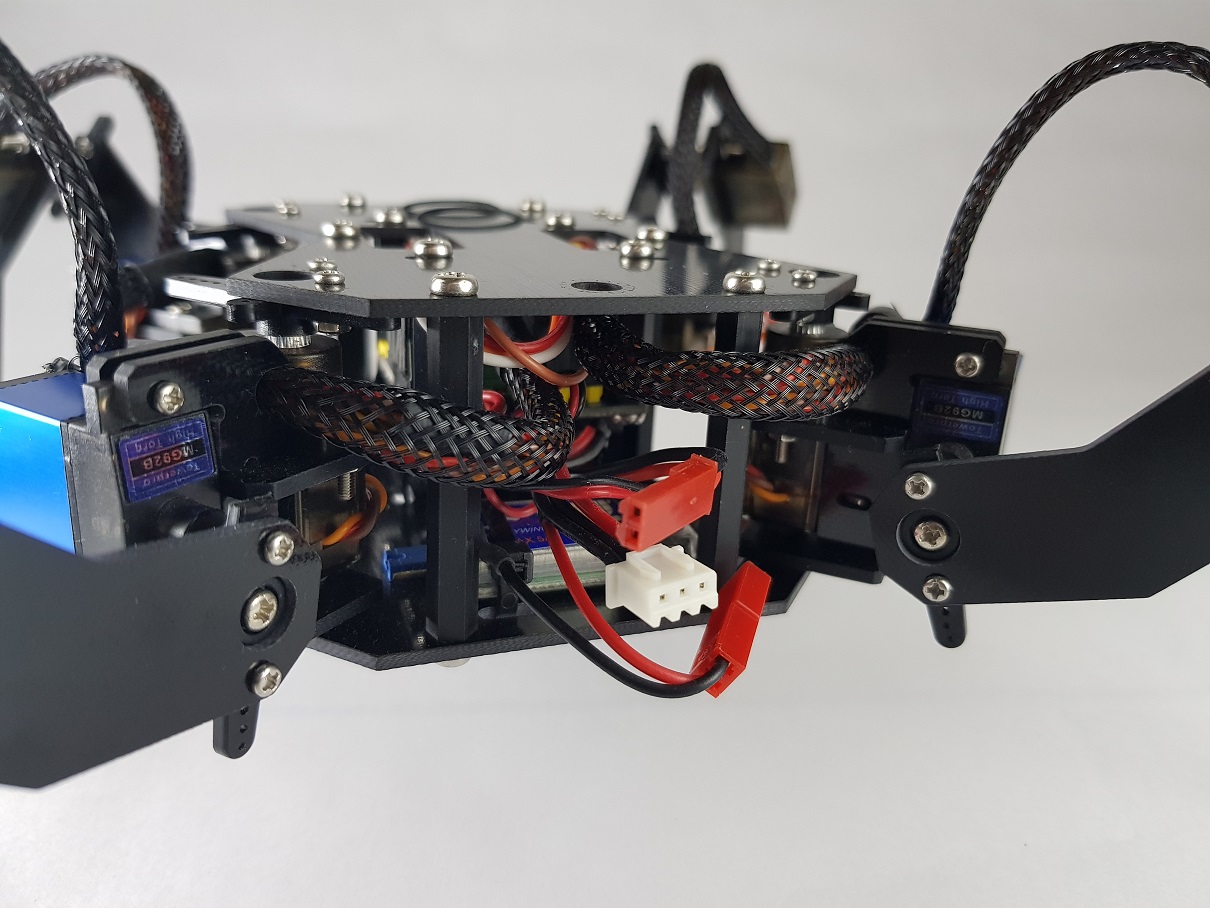
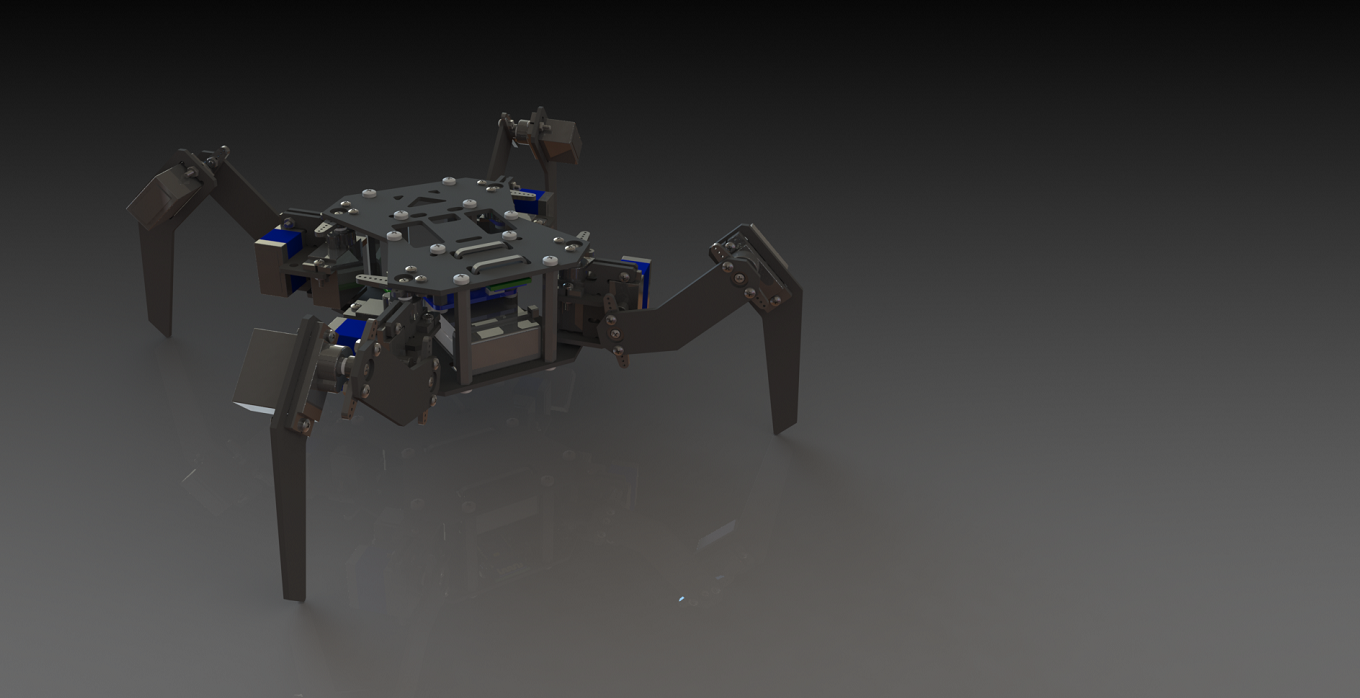
MINIMAL & COMPACT DESIGN
FEATURE
-Body translation X, Y, Z axis
-Body rotation Pitch, Roll, Yaw axis
-Walk forward
-Walk backward
-Walk left
-Walk right
-Walk forward left
-Walk forward right
-Walk backward left
-Walk backward right
-Turning left
-Turning right
-XYZ warmup demo
-Pitch Roll Yaw warmup demo
-Full IK warmup demo
-Adjustable walking speed
-Body translation X, Y, Z axis
-Body rotation Pitch, Roll, Yaw axis
-Walk forward
-Walk backward
-Walk left
-Walk right
-Walk forward left
-Walk forward right
-Walk backward left
-Walk backward right
-Turning left
-Turning right
-XYZ warmup demo
-Pitch Roll Yaw warmup demo
-Full IK warmup demo
-Adjustable walking speed
SPECIFICATION
-Frame structure: Fiberglass
-Servo: Full metal gear
-Coxa servo torque: 1.9kg/cm @ 4.8v
-Femur servo torque: 3.0kg/cm @ 4.8v
-Tibia servo torque: 1.9kg/cm @ 4.8v
-Servo dead band width: 1uS
-Servo controller: 32bits, 48Mhz
-Servo controller PWM resolution: 1uS
-Servo controller PWM accuracy: 0.1uS
-Operating voltage (servo): 5Vdc
-Operating voltage (servo controller): 5Vdc
-DC voltage regulator: 5Vdc, 3ah
-Robot battery: 2 cell 7.4v 900mah Li-Po
-Gamepad battery: 2x 1.5v AAA size (not included)
-Robot operating duration: approx 25mins (single charge)
-Size: approx L:100mm x W:200mm x H:85mm (shutdown posture)
-Weight: approx 340 grams
-Working distance: approx 10 meters
(open space, gamepad to PC & PC to robot)
-Frame structure: Fiberglass
-Servo: Full metal gear
-Coxa servo torque: 1.9kg/cm @ 4.8v
-Femur servo torque: 3.0kg/cm @ 4.8v
-Tibia servo torque: 1.9kg/cm @ 4.8v
-Servo dead band width: 1uS
-Servo controller: 32bits, 48Mhz
-Servo controller PWM resolution: 1uS
-Servo controller PWM accuracy: 0.1uS
-Operating voltage (servo): 5Vdc
-Operating voltage (servo controller): 5Vdc
-DC voltage regulator: 5Vdc, 3ah
-Robot battery: 2 cell 7.4v 900mah Li-Po
-Gamepad battery: 2x 1.5v AAA size (not included)
-Robot operating duration: approx 25mins (single charge)
-Size: approx L:100mm x W:200mm x H:85mm (shutdown posture)
-Weight: approx 340 grams
-Working distance: approx 10 meters
(open space, gamepad to PC & PC to robot)
SYSTEM REQUIREMENT
-Windows 7 & above
-Bluetooth module support standard serial over bluetooth
-USB port to plug in gamepad receiver
USER NOTE
-This is a DIY kits
-GUI program & user manual are available to download from this site
-Windows 7 & above
-Bluetooth module support standard serial over bluetooth
-USB port to plug in gamepad receiver
USER NOTE
-This is a DIY kits
-GUI program & user manual are available to download from this site
SHIELD ON
Free download SHIELD 3D STL file is now available. Just 3D print it and snap it on. No screws require.
PHOTO GALLERY